Die Softwareimplementierung wurde in 3 Pakete unterteilt.
FPORT
I2C
Regelung
FPORT
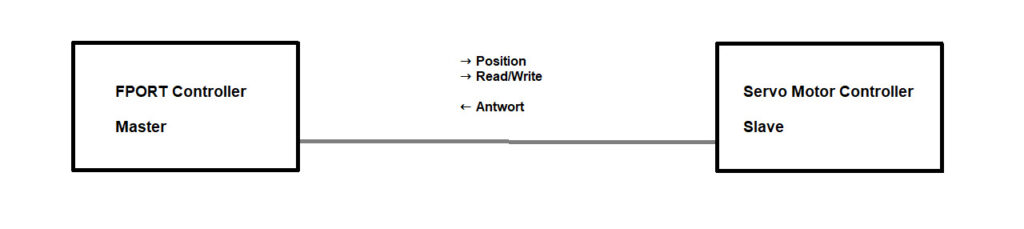
Der Servomotor wird mit dem UART Protokoll FPORT gesteuert. Der Servomotor empfängt einen Winkel von der FPORT Schnittstelle und regelt dann genau darauf zu.
Die Schnittstelle besteht aus:
Versorgungsspannung (+)
Ground (-)
Halfduplex Leitung
Als zusätzliche Funktion wäre noch gedacht gewesen über den FPORT auch noch ein PWM Signal zu senden um den Winkel einzustellen. Das wurde aber beim ersten Prototyp nicht ausgeführt.
Die größte Herausforderung war hier die Kommunikation mit einem Draht.
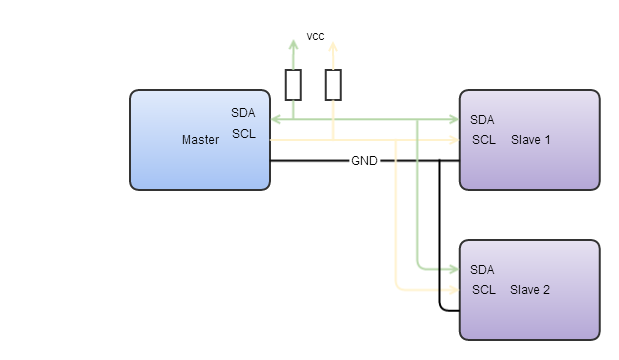
I2C
Der I2C Bus wird zum Ansteuern der zwei Magnetsensoren verwendet.
Es wurde der TLE493d-W2B6 gewählt, da dieser mit unterschiedlichen Standard Adressen ausgeliefert wird.
Diese Sensoren messen die Winkel zweier Getriebestufen, das Verhältnis kann zur Ermittlung der Servoposition verwendet werden.
Die Anpassung der Infineonsoftware an unsere Bedürfnisse war hier die größte Herausforderung.
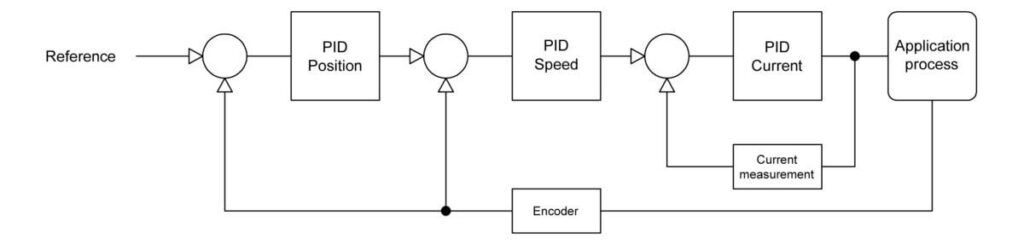
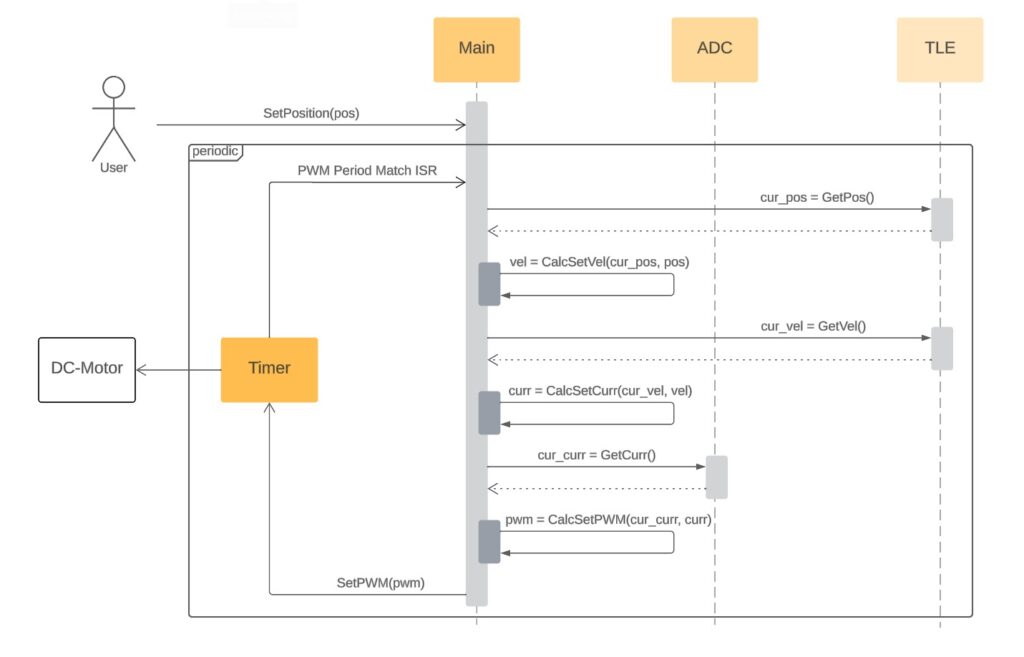
Regelung
Es wird eine Kaskadenregelung verwendet. Die 3 Regelungsstufen sind hier:
Strom (PI)
Position (P)
Geschwindigkeit(P)
Aus diesen Größen wird, dann die Korrektur der aktuellen Position errechnet und danach positioniert.